TimTaiLieu.vn - Tài liệu, ebook, giáo trình, đồ án, luận văn
TimTaiLieu.vn - Thư viện tài liệu, ebook, đồ án, luận văn, tiểu luận, giáo trình các lĩnh vực CNTT, Ngoại ngữ, Luật, Kinh doanh, Tài chính, Khoa học...

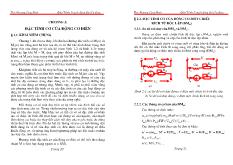 Bài giảng Đặc tính cơ của động cơ điện
Bài giảng Đặc tính cơ của động cơ điện(Bản scan) Chương 1 đã cho ta thấy, khi đặt hai đường đặc tính cơ M và Mc lên cùng một hệ trục tọa độ, ta có thể xác định được trạng thái làm việc của động cơ và của hệ (xem hình 1-2 và hình 1-3): trạng thái xác lập khi M = Mc ứng với giao điểm của hai đường đặc tính M và Mc;
 12 trang | Chia sẻ: haohao89 | Ngày: 04/07/2013 | Lượt xem: 2012 | Lượt tải: 1
12 trang | Chia sẻ: haohao89 | Ngày: 04/07/2013 | Lượt xem: 2012 | Lượt tải: 1 Giáo trình truyền động điện tự động
Giáo trình truyền động điện tự động(Bản scan) 1.1 Mục đích và yêu cầu: Nắm được cấu trúc chung của hệ thống truyền động điện tự động (HT-TĐĐTĐ). Nắm được đặc tính của từng loại động cơ trong các hệ thống truyền động điện tự động cụ thể.
11 trang | Chia sẻ: haohao89 | Ngày: 04/07/2013 | Lượt xem: 2139 | Lượt tải: 1 Hướng dẫn sử dụng biên dịch và lập trình cơ bản cho 8501
Hướng dẫn sử dụng biên dịch và lập trình cơ bản cho 8501(Bản scan) 1.1) Tiêu chuẩn trong lựa chọn một bộ vi điều khiển: là khả năng sẵn sàng đáp ứng về số lượng trong hiện tại và tương lai. Đối với một số nhà thiết kế điều này là quan trọng hơn cả. Hiện nay, các bộ vi điều khiển 8 bit đứng đầu là họ 8051 có số lượng lớn nhất các nhà cung cấp đa dạng (nhiều nguồn).
128 trang | Chia sẻ: haohao89 | Ngày: 04/07/2013 | Lượt xem: 2430 | Lượt tải: 1 Bài giảng Điều khiển vector không gian
Bài giảng Điều khiển vector không gian(Bản scan) Để khảo sát vector không gian trong một hệ tọa độ mới khi biết được vị trí của nó trong hệ tọa độ cũ, ta sử dụng phép chuyển tọa độ. Ta phân biệt các hệ thống tọa độ đứng yên, hệ tọa độ quay với vận tốc không đổi và hệ tọa độ quay với vận tốc biến thiên.
11 trang | Chia sẻ: haohao89 | Ngày: 04/07/2013 | Lượt xem: 2237 | Lượt tải: 0 Điều khiển vận tốc động cơ không đồng bộ vòng kín
Điều khiển vận tốc động cơ không đồng bộ vòng kín(Bản scan) Trên hình vẽ là sơ đồ nguyên lý hệ điều khiển động cơ không đồng bộ bằng bộ biến áp tần áp sáu bước. Độ lớn điện áp được điều khiển bằng cách thay đổi biên độ áp trên tụ một chiều và tần số áp ra được điều khiển bằng cách thay đổi chu kỳ xung kích cho bộ nghịch lưu áp.
15 trang | Chia sẻ: haohao89 | Ngày: 04/07/2013 | Lượt xem: 2023 | Lượt tải: 1 Bài giảng môn Cơ sở truyền động điện: Điều khiển công suất trượt trả về nguồn
Bài giảng môn Cơ sở truyền động điện: Điều khiển công suất trượt trả về nguồn(Bản scan) Áp dụng cho động cơ không đồng bộ rotor dây quấn. Nguyên lý hoạt động tương tự trường hợp điều khiển vận tốc động cơ bằng điện trở phụ mạch rotor. Ở đây, công suất trượt rotor thay vì tiêu hao trên điện trở phụ mạch rotor sẽ được chuyển qua bộ biến đổi công suất để trả về nguồn xoay chiều.
10 trang | Chia sẻ: haohao89 | Ngày: 04/07/2013 | Lượt xem: 2434 | Lượt tải: 3 Điều khiển vận tốc bằng cách thay đổi tần số nguồn áp
Điều khiển vận tốc bằng cách thay đổi tần số nguồn áp(Bản scan) Do đó, nếu điều khiển vận tốc động cơ dưới định mức chỉ bằng cách thay đổi tần số nguồn và giữ nguyên độ lớn điện áp stator, từ thông động cơ sẽ tăng lên đến giá trị bão hòa. Động cơ không thể phát triển hiệu quả moment cực đại khi dòng điện tăng.
17 trang | Chia sẻ: haohao89 | Ngày: 04/07/2013 | Lượt xem: 2015 | Lượt tải: 4 Bài giảng Điều khiển công suất trượt trả về nguồn
Bài giảng Điều khiển công suất trượt trả về nguồn(Bản scan) Áp dụng cho động cơ không đồng bộ rotor dây quấn. Nguyên lý hoạt động tương tự trường hợp điều khiển vận tốc động cơ bằng điện trở phụ mạch rotor. Ở đây, công suất trượt rotor thay vì tiêu hao trên điện trở phụ mạch rotor sẽ được chuyển qua bộ biến đổi công suất để trả về nguồn xoay chiều.
10 trang | Chia sẻ: haohao89 | Ngày: 04/07/2013 | Lượt xem: 3217 | Lượt tải: 3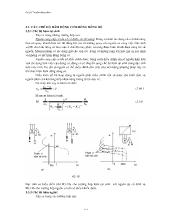 Bài giảng Các chế độ hãm động cơ không đồng bộ
Bài giảng Các chế độ hãm động cơ không đồng bộ(Bản scan) Nguồn cung cấp có tần số cố định -tải thế năng: Động cơ dưới tác dụng của tải thế năng làm nó quay nhanh hơn tốc độ đồng bộ của từ trường quay của nguồn ac cung cấp. Đặc tính (M) cho biết động cơ làm việc ở chế độ máy phát, cơ năng được biến thành điện năng trả về nguồn.
10 trang | Chia sẻ: haohao89 | Ngày: 04/07/2013 | Lượt xem: 2846 | Lượt tải: 4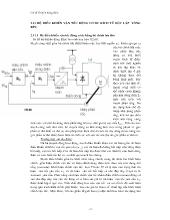 Bài giảng Hệ điều khiển vận tốc động cơ DC kích từ độc lập vòng
Bài giảng Hệ điều khiển vận tốc động cơ DC kích từ độc lập vòng(Bản scan) Mạch công suất gồm bộ chỉnh lưu điều khiển mắc vào lưới nguồn ac. Điện áp ngõ ra của bộ chỉnh lưu mắc vào phần cứng của động cơ. Giả thiết mạch kích từ được nuôi bởi một nguồn dc độc lập khác và được thiết lập ở giá trị không thay đổi bằng định mức.
17 trang | Chia sẻ: haohao89 | Ngày: 04/07/2013 | Lượt xem: 2085 | Lượt tải: 2

