TimTaiLieu.vn - Tài liệu, ebook, giáo trình, đồ án, luận văn
TimTaiLieu.vn - Thư viện tài liệu, ebook, đồ án, luận văn, tiểu luận, giáo trình các lĩnh vực CNTT, Ngoại ngữ, Luật, Kinh doanh, Tài chính, Khoa học...

 Chương 2: Thiết bị và kỹ thuật thực hành
Chương 2: Thiết bị và kỹ thuật thực hànhNội dung 2.1 .Các bộ phận chủ yếu của quang phổ kế Raman. 2.2 .Các nguồn kích thích của phổ kế Raman. 2.3. Kích thích mẫu. 2.4. Máy đơn sắc. 2.5. Hệ thống thu nhận tín hiệu Raman
 14 trang | Chia sẻ: nguyenlinh90 | Ngày: 18/07/2019 | Lượt xem: 1068 | Lượt tải: 0
14 trang | Chia sẻ: nguyenlinh90 | Ngày: 18/07/2019 | Lượt xem: 1068 | Lượt tải: 0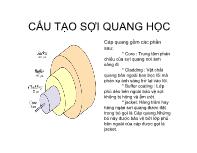 Tìm hiểu Sợi quang học
Tìm hiểu Sợi quang họcCáp quang gồm các phần sau: * Core : Trung tâm phản chiếu của sợi quang nơi ánh sáng đi * Cladding : Vật chất quang bên ngoài bao bọc lõi mà phản xạ ánh sáng trở lại vào lõi. * Buffer coating : Lớp phủ dẻo bên ngoài bảo vệ sợi không bị hỏng và ẩm ướt * jacket: Hàng trăm hay hàng ngàn sợi quang được đặt trong bó gọi là Cáp quang.Những bó này đư...
26 trang | Chia sẻ: nguyenlinh90 | Ngày: 18/07/2019 | Lượt xem: 991 | Lượt tải: 0 Báo cáo Quangtranzito
Báo cáo Quangtranzito1. Giới thiệu về tranzitor lưỡng cực • Công dụng • Cấu tạo • Nguyên tắc hoạt động 2. Quang tranzito • Cấu tạo • Nguyên tắc • Các loại quang tranzito • Ứng dụng
14 trang | Chia sẻ: nguyenlinh90 | Ngày: 18/07/2019 | Lượt xem: 1238 | Lượt tải: 0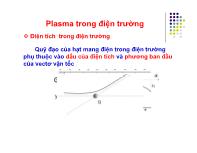 Bài giảng Plasma trong điện trường
Bài giảng Plasma trong điện trườngPlasma trong điện trường Sự tán xạ các hạt mang điện Là sự lệch quỹ đạo chuyển động khi các hạt tương tác với nhau. Mọi sự tán xạ đều được đặc trưng bởi tiết diện hiệu dụng tán xạ Đối với hạt không mang điện Đối với hạt mang điện chúng sẽ bị tán xạ mà không cần hoàn toàn tiếp xúc nhau. Sự tán xạ của plasma được khảo sát với ba miền...
15 trang | Chia sẻ: nguyenlinh90 | Ngày: 18/07/2019 | Lượt xem: 1370 | Lượt tải: 0 Bài giảng Phát xạ điện tử thứ cấp
Bài giảng Phát xạ điện tử thứ cấpTóm tắt lý thuyết lye và dekker Độ mất mát năng lượng của hạt sơ cấp được tính bằng định luật Whiddington's: dE/dx = -Ep/R trong đó A là hằng số đặt trưng cho vật liệu, R độ xuyên sâu.
9 trang | Chia sẻ: nguyenlinh90 | Ngày: 18/07/2019 | Lượt xem: 1443 | Lượt tải: 0 Unit 4 Telecommunications - Week 2
Unit 4 Telecommunications - Week 2(Bản scan) Unit 4 Telecommunications - Week 2
36 trang | Chia sẻ: nguyenlinh90 | Ngày: 18/07/2019 | Lượt xem: 1469 | Lượt tải: 0 Unit 4 Telecommunications - Week 1
Unit 4 Telecommunications - Week 1CONTENTS • Reading and note-taking • Simple past versus Present Perfect • Transmission lines
15 trang | Chia sẻ: nguyenlinh90 | Ngày: 18/07/2019 | Lượt xem: 1414 | Lượt tải: 0 Unit 3 Radio - Week 3
Unit 3 Radio - Week 3CONTENTS • Information transfer • Reduced time clauses • Word formation • Radio • Describing a process
22 trang | Chia sẻ: nguyenlinh90 | Ngày: 18/07/2019 | Lượt xem: 1526 | Lượt tải: 0 Unit 3 Radio - Week 2
Unit 3 Radio - Week 2CONTENTS • Information transfer • Reduced time clauses • Word formation • Radio • Describing a process
10 trang | Chia sẻ: nguyenlinh90 | Ngày: 18/07/2019 | Lượt xem: 1178 | Lượt tải: 0 Unit 3 Radio - Week 1
Unit 3 Radio - Week 1CONTENTS • Information transfer • Reduced time clauses • Word formation • Radio • Describing a process
9 trang | Chia sẻ: nguyenlinh90 | Ngày: 18/07/2019 | Lượt xem: 1356 | Lượt tải: 0

