TimTaiLieu.vn - Tài liệu, ebook, giáo trình, đồ án, luận văn
Tổng hợp tất cả tài liệu, ebook, giáo trình Kỹ Thuật - Công Nghệ chọn lọc và hay nhất.

 Bài giảng Lập trình dùng Grafcet
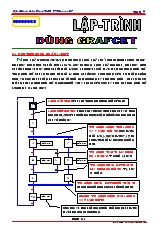
Bài giảng Lập trình dùng GrafcetNgôn ngữ Grafcet xây dựng theo dạng ngôn ngữ SFC “Sequential Function Chart” trình bày trong tiêu chuẩn IEC 1131-3. Đây là dạng ngôn ngữ lập trình, trình bày một chuổi nhiệm vụ (hay một chuổi tuần tự các nhiệm vụ) cần thực thi, theo dạng giản đồ. Trong giản đồ chúng ta mô tả tuần tự một chuổi các họat động của hệ thống kiểm sóat, và các tình huống ...
 15 trang | Chia sẻ: haohao89 | Ngày: 29/06/2013 | Lượt xem: 10066 | Lượt tải: 1
15 trang | Chia sẻ: haohao89 | Ngày: 29/06/2013 | Lượt xem: 10066 | Lượt tải: 1 Bài giảng Các lệnh cơ bản lập trình cho PLC
Bài giảng Các lệnh cơ bản lập trình cho PLCCác đặc điểm cơ bản cần nhớ khi sử dụng lịnh ORB được liệt kê như sau: Lịnh ORB là lịnh độc lập và không kết hợp với bất kỳ thiết bị hay con số nào . Lịnh ORB được dùng để nối song song nhiều nhánh chứa các tiếp điểm, thường là các khối đấu nối tiếp với khối trước đó. Các khối đấu nối tiếp là tập hợp các tiếp điềm đấu nối tiếp nhau hay dùng tron...
10 trang | Chia sẻ: haohao89 | Ngày: 29/06/2013 | Lượt xem: 2789 | Lượt tải: 1 Bài giảng Tổng quan về hệ thống điều khiển tự động và bộ lập trình PLC
Bài giảng Tổng quan về hệ thống điều khiển tự động và bộ lập trình PLCVới sự phát triển khoa học kỹ-thuật hiện nay, một hệ thống điều khiển tự động được hình thành từ các thành phần như sau: CƠ CẤU HỌAT ĐỘNG : Bao gồm các thiết bị hay các khí cụ như sau: Động cơ điện. Kích thủy lực, khí nén. Valve điện từ . CÁC CẢM BIẾN: Nhiệm vụ của các cảm biến dùng thu thập dử liệu; các cảm biến có thể thuộc các dạng như ...
11 trang | Chia sẻ: haohao89 | Ngày: 29/06/2013 | Lượt xem: 2588 | Lượt tải: 1 Câu hỏi ôn tập đại cương về Kỹ thuật (MEC 201)
Câu hỏi ôn tập đại cương về Kỹ thuật (MEC 201)– Theo từ điển American Heritage Dictionary of the English Language:” Kỹ thuật là sự ứng dụng của các nguyên tắc toán và khoa học khác vào thực tế để thiết kế, chế tạo và vận hành các cấu trúc, máy móc, quá trình, hệ thống một cách kinh tế và hiệu quả”. - Theo Ủy ban kiểm định Hoa kỳ:”Kỹ thuật là lĩnh vực ở đó kiến thức về khoa học tự nhiên và to...
21 trang | Chia sẻ: haohao89 | Ngày: 29/06/2013 | Lượt xem: 3909 | Lượt tải: 3 Đề tài Tính toán các kích thước chủ yếu của máy biến áp: Đàm một pha
Đề tài Tính toán các kích thước chủ yếu của máy biến áp: Đàm một phaNgày nay trình độ khoa học phát triển mạnh mẽ có nhiều nghành khoa học quan trọng ra đời như điện điện tử tin học cùng với sự phát triển khoa học kỹ thuật nền kinh tế cũng phát triển mạnh mẽ đặc biệt là nền công nghiệp đã có nhiều các nhà máy, xí nghiệp ra đời với trình độ cao, hiện đại hoá trên cả nước vì vậy yêu cầu đất nước phải có một hệ thống ...
36 trang | Chia sẻ: haohao89 | Ngày: 29/06/2013 | Lượt xem: 2181 | Lượt tải: 0 Đề tài Tính toán các kích thước chủ yếu của máy biến áp - Nguyễn Duy Hưng
Đề tài Tính toán các kích thước chủ yếu của máy biến áp - Nguyễn Duy HưngNgày nay trình độ khoa học phát triển mạnh mẽ có nhiều nghành khoa học quan trọng ra đời như điện điện tử tin học cùng với sự phát triển khoa học kỹ thuật nền kinh tế cũng phát triển mạnh mẽ đặc biệt là nền công nghiệp đã có nhiều các nhà máy, xí nghiệp ra đời với trình độ cao, hiện đại hoá trên cả nước vì vậy yêu cầu đất nước phải có một hệ thống ...
33 trang | Chia sẻ: haohao89 | Ngày: 29/06/2013 | Lượt xem: 2170 | Lượt tải: 2 Đề tài Nghiên cứu các kích thước chủ yếu của máy biến áp - Đàm Anh Tuấn
Đề tài Nghiên cứu các kích thước chủ yếu của máy biến áp - Đàm Anh TuấnNgày nay trình độ khoa học phát triển mạnh mẽ có nhiều nghành khoa học quan trọng ra đời như điện điện tử tin học cùng với sự phát triển khoa học kỹ thuật nền kinh tế cũng phát triển mạnh mẽ đặc biệt là nền công nghiệp đã có nhiều các nhà máy, xí nghiệp ra đời với trình độ cao, hiện đại hoá trên cả nước vì vậy yêu cầu đất nước phải có một hệ thống ...
36 trang | Chia sẻ: haohao89 | Ngày: 29/06/2013 | Lượt xem: 2157 | Lượt tải: 2 Đề tài Nghiên cứu các kích thước chủ yếu của máy biến áp
Đề tài Nghiên cứu các kích thước chủ yếu của máy biến ápNgày nay trình độ khoa học phát triển mạnh mẽ có nhiều nghành khoa học quan trọng ra đời như điện điện tử tin học cùng với sự phát triển khoa học kỹ thuật nền kinh tế cũng phát triển mạnh mẽ đặc biệt là nền công ra đời với trình độ cao, hiện đại hoá trên cu cầu đất nước phải có một hệ thống điện nghiệp đã có nhiều các nhà máy, xí nghiệp iện ổn định...
42 trang | Chia sẻ: haohao89 | Ngày: 29/06/2013 | Lượt xem: 2235 | Lượt tải: 0 Đề tài Tính toán các kích thước chủ yếu của máy biến áp - Phan Hồng Phong
Đề tài Tính toán các kích thước chủ yếu của máy biến áp - Phan Hồng PhongNgày nay trình độ khoa học phát triển mạnh mẽ có nhiều nghành khoa học quan trọng ra đời như điện điện tử tin học cùng với sự phát triển khoa học kỹ thuật nền kinh tế cũng phát triển mạnh mẽ đặc biệt là nền công nghiệp đã có nhiều các nhà máy, xí nghiệp ra đời với trình độ cao, hiện đại hoá trên cả nước vì vậy yêu cầu đất nước phải có một hệ thống ...
42 trang | Chia sẻ: haohao89 | Ngày: 29/06/2013 | Lượt xem: 1942 | Lượt tải: 0 Đề tài Tính toán các kích thước chủ yếu của máy biến áp - Đàm Anh Tuấn K33 ID
Đề tài Tính toán các kích thước chủ yếu của máy biến áp - Đàm Anh Tuấn K33 IDNgày nay trình độ khoa học phát triển mạnh mẽ có nhiều nghành khoa học quan trọng ra đời như điện điện tử tin học cùng với sự phát triển khoa học kỹ thuật nền kinh tế cũng phát triển mạnh mẽ đặc biệt là nền công nghiệp đã có nhiều các nhà máy, xí nghiệp ra đời với trình độ cao, hiện đại hoá trên cả nước vì vậy yêu cầu đất nước phải có một hệ thống ...
41 trang | Chia sẻ: haohao89 | Ngày: 29/06/2013 | Lượt xem: 2177 | Lượt tải: 0

