TimTaiLieu.vn - Tài liệu, ebook, giáo trình, đồ án, luận văn
Tổng hợp tất cả tài liệu, ebook, giáo trình Tự Động Hóa chọn lọc và hay nhất.

 Bài giảng Kỹ Thuật Điện 2 Chương 2: Động cơ không đồng bộ
Bài giảng Kỹ Thuật Điện 2 Chương 2: Động cơ không đồng bộA Momen khởi động bình thường Dòng điện khởi động bình thường 0,5 0,5 B Momen khởi động bình thường Dòng điện khởi động thấp 0,4 0,6 C Momen khởi động cao Dòng điện khởi động thấp 0,3 0,7 D Momen khởi động cao Độtrượt cao 0,5 0,5 Rotor dây quấn Tùy thuộc vào sựthay đổi của điện trởrotor 0,5 0,5
 16 trang | Chia sẻ: maiphuongtt | Ngày: 13/06/2014 | Lượt xem: 2490 | Lượt tải: 0
16 trang | Chia sẻ: maiphuongtt | Ngày: 13/06/2014 | Lượt xem: 2490 | Lượt tải: 0 Giới thiệu về động cơ một chiều
Giới thiệu về động cơ một chiều1. Các loại động cơ một chiều dùng cho robot 2. Điều chỉnh tốc độ động cơ điện một chiều 3. Giữ cứng đường đặc tính tốc độ 4. Phương pháp PWM điều chế điện áp 5. Một số mạch ứng dụng
11 trang | Chia sẻ: maiphuongtt | Ngày: 13/06/2014 | Lượt xem: 2586 | Lượt tải: 3 Giáo án robot công nghiệp
Giáo án robot công nghiệpCác nhà sáng chế kĩ thuật dựa trên những cơ cấu máy móc có khả năng bắt chước lao động của con người bằng cơ bắp, đã cho ra đời những cơ cấu robot thực sự đầu tiên vào những năm trước đại chiến thế giới thứ hai. Vào thời kì đó những cơ cấu như vậy có nhu cầu thực sự để ứng dụng trong môi trường phóng xạ ở các cơ quan nghiên cứu nguyên tử. Lúc đầu r...
 102 trang | Chia sẻ: maiphuongtt | Ngày: 13/06/2014 | Lượt xem: 2393 | Lượt tải: 4
102 trang | Chia sẻ: maiphuongtt | Ngày: 13/06/2014 | Lượt xem: 2393 | Lượt tải: 4 Môn học thí nghiệm điều khiển tự động
Môn học thí nghiệm điều khiển tự độngDụng cụ đo lường (instrument) là một thiết bị biến đổi đại lượng vật lý cần đo (measurand) thành một đại lượng thích hợp tương đương có thể ghi lại được (measurement). Đại lượng đo thường được sử dụng trong một hệ thống đơn vị(units) tiêu chuẩn để có thể so sánh giữa dụng cụ đo này với dụng cụ đo khác. VD: Dụng cụ đo: thước đo chiều dài. ...
124 trang | Chia sẻ: maiphuongtt | Ngày: 13/06/2014 | Lượt xem: 2078 | Lượt tải: 1 Thiết kế hệ thống đo và khống chế nhiệt độ bằng máy vi tính
Thiết kế hệ thống đo và khống chế nhiệt độ bằng máy vi tínhBộvi điều khiển 8051 hay còn gọi là bộ vi xử lý được cấu tạo là một vi mạch số mật độ cực lớn làm việc theo chương trình tức theo nguyên tắc nhận lệnh từbên ngoài và thực hiện lệnh đó. Bộvi xửlý là một hệthống thao tác trên các bit 0 và 1, nhưng bản thân hệt hống không giải quyết được vấn đềgì cả, mà bài toán chỉ được giải khi bộ vi xửlý t...
35 trang | Chia sẻ: maiphuongtt | Ngày: 13/06/2014 | Lượt xem: 1917 | Lượt tải: 1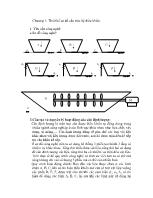 Thiết kế sơ đồ cấu trúc hệ điều khiển
Thiết kế sơ đồ cấu trúc hệ điều khiểnCân định lượng là một laọi cân được điều khiển tự động dùng trong nhiều ngành công nghiệp ởcác lĩnh vực khác nhau như: hoá chất, xây dựng, xi măng,. Cân định lượng dùng để pha chế các loại vật liệu khác nhau với liều lượng được đặt trước, sau đó được trộn đều đểtiếp tục cho khâu kế tiếp. Ở sơ đồ công nghệ trên ta sử dụng hệthống 3 phễu tạ...
14 trang | Chia sẻ: maiphuongtt | Ngày: 13/06/2014 | Lượt xem: 2066 | Lượt tải: 0 Bài giảng : Điều khiển quá trình công nghệ
Bài giảng : Điều khiển quá trình công nghệQUÁ TRÌNH SẢN XUẤT: Quá trình SX là QT sửdụng năng lượng (điện, hóa, cơ, sinh ) kết hợp với CSVC( máy móc, TB, nhà xưởng) tác động lên nguyên liệu đểnâng cao CLSP. QUÁ TRÌNH CÔNG NGHỆ: bao gồm các giai đoạn và các phương thúc tác động lên QTSX trong các giai đoạn đó dểhình thành nên SP. QTCN chính là cách thức sản xuất.
85 trang | Chia sẻ: maiphuongtt | Ngày: 13/06/2014 | Lượt xem: 2869 | Lượt tải: 2 Điều khiển hệ cầu trục dựa trên luật PID
Điều khiển hệ cầu trục dựa trên luật PIDBài báo đưa ra mô hình toán của hệ cầu trục và các kết quả nghiên cứu thiết kế bộ điều khiển cho chúng dựa trên luật PID với mong muốn giảm dao động của tải và khả năng ứng dụng vào thực tiễn.
9 trang | Chia sẻ: maiphuongtt | Ngày: 13/06/2014 | Lượt xem: 1952 | Lượt tải: 0 Chương 4 : Điều khiển mờ
Chương 4 : Điều khiển mờGiờ ta xét phát biểu thông thường về tốc độ một chiếc xe môtô : chậm, trung bình, hơi nhanh, rất nhanh. Phát biểu “CHẬM” ở đây không được chỉ rõ là bao nhiêu km/h, như vậy từ “CHẬM”có miền giá trịlà một khoảng nào đó, ví dụ 5km/h – 20km/hchẳng hạn. Tập hợp L={chậm, trung bình, hơi nhanh, rất nhanh}nhưvậy được gọi là một tập các biến ngôn ngữ...
98 trang | Chia sẻ: maiphuongtt | Ngày: 13/06/2014 | Lượt xem: 2525 | Lượt tải: 1 Chương 2: Điều khiển thích nghi
Chương 2: Điều khiển thích nghiThích nghi là quá trình thay đổi thông số và cấu trúc hay tác động điều khiển trên cơ sở lượng thông tin có được trong quá trình làm việc với mục đích đạt được một trạng thái nhất định, thường là tối ưu khi thiếu lượng thông tin ban đầu cũng như điều kiện làm việc thay đổi
242 trang | Chia sẻ: maiphuongtt | Ngày: 13/06/2014 | Lượt xem: 2088 | Lượt tải: 2

